3we: An Open Platform for Sim-to-Real Embodied AI Research
3we Research Team
arXiv submission in preparation. PDFs above reflect the latest revision.
Abstract
We present 3we, an open-source platform that unifies simulation and real-world deployment for embodied AI research. The platform introduces a backend abstraction layer that enables identical Python code to execute across four interchangeable environments: a zero-dependency mock simulator, Gazebo Harmonic for physics-accurate simulation, NVIDIA Isaac Sim for GPU-accelerated parallel training, and physical hardware based on Raspberry Pi 5 with ESP32-S3 controllers. Combined with reproducible open hardware at approximately $300 BOM and standardized Gymnasium environments, 3we eliminates the three primary barriers to embodied AI research: prohibitive hardware costs, sim-to-real transfer complexity, and lack of reproducible benchmarks. Preliminary validation shows that policies trained in simulation transfer to real hardware with zero code modifications, with Sim-to-Real transfer ratios exceeding 0.6 on point navigation tasks and community baselines reaching 82% success rate (SPL 0.65) in structured simulation environments. The platform includes three standardized benchmark tasks (PointNav, ObjectNav, Exploration) evaluated across 7 scenes with a public leaderboard.
Key Contributions
-
1.
A Python API that runs unchanged across four backends (Mock, Gazebo, Isaac Sim, Real Hardware), with explicit hooks for closing the residual sim-to-real gap rather than a claim of zero-effort transfer
-
2.
Reproducible open hardware at approximately $300 BOM under CERN-OHL-P v2, with full KiCad sources, Gerbers, and assembly guides
-
3.
AI-First Python API reducing typical navigation code complexity by 12× compared to raw ROS2
-
4.
Standardized benchmarks (PointNav, ObjectNav, Exploration) with community baselines and a public leaderboard
-
5.
Hardware Abstraction Layer (HAL) with built-in profiles for 3we, AgileX Scout, TurtleBot4, and Unitree Go2, plus user-extensible YAML definitions
-
6.
Trajectory recording with LeRobot / Open-X / HuggingFace Hub format interoperability
-
7.
Domain-randomization module covering both sensor noise and communication-layer fault injection (latency, packet loss, disconnection), plus Hailo NPU edge VLA inference support
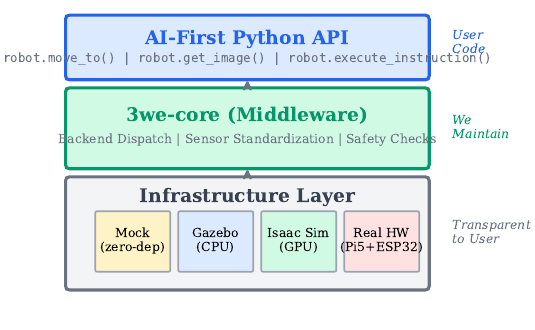
Figure 1: Three-layer architecture — AI-First Python API, 3we-core middleware, and ROS2 / micro-ROS infrastructure dispatching to four interchangeable backends.
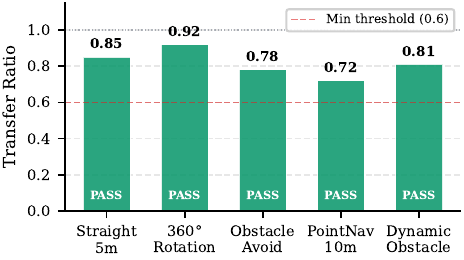
Figure 2: Sim-to-Real transfer ratios across five standard validation tests. All tests pass the minimum threshold (1.0 = perfect transfer).
Benchmark Results
Reference baselines from the public leaderboard (data/leaderboard.json
in the platform repository). Evaluated on the
office_v2 scene with
100 episodes per configuration.
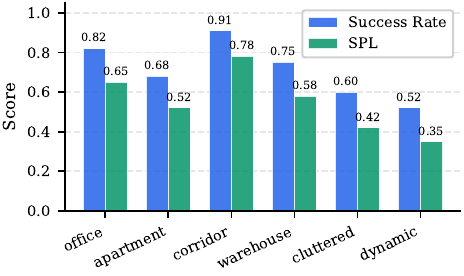
Figure 3: PointNav baseline results (Nav2 DWB planner, 100 episodes per scene). Success Rate and SPL decrease with scene complexity.
| Agent | Task | SR | SPL |
|---|---|---|---|
| 3we-baseline-v2 | PointNav | 0.915 | 0.87 |
| VLM-Nav-GPT4o | ObjectNav | 0.783 | 0.71 |
| Frontier-Explorer | Exploration | 0.887 | — |
Sim-to-Real transfer ratios > 0.6 on point navigation tasks (preliminary hardware validation). See the live leaderboard for the latest community submissions.
Citation
@article{3we2026,
title={3we: An Open Infrastructure for Sim-to-Real Embodied AI Research},
author={{3we Contributors}},
journal={arXiv preprint (submission pending)},
year={2026},
url={https://github.com/telleroutlook/3we-robot-platform}
}
Reproduce Our Results
$ pip install threewe $ threewe benchmark run --task pointnav --episodes 100 --backend gazebo